玻璃基板洁净机器人(可定制) PHT2200
这款产品是一种在洁净室内使用的,用于插补器的水平多关节式玻璃基板搬运机器人。
它可以进行前后(X轴)、旋转(θ轴)、上下(Z轴)的操作,能够适应大气中的晶圆搬运。驱动电机是AC伺服电机,所有轴都是绝对值编码器规格。

设备规格
- 型号
- PHT2200
- 可搬运质量
- 10kg(手部基座、手部、工作物重量的总和)
- 手臂
- 单臂
材料:铝、CFRP、陶瓷
- 安装环境
- 洁净室
空气温度:10℃~35℃ 湿度:70%RH以下
- 作业范围
- X轴:1050mm
θ轴:340deg
Z轴:400mm
- 运行速度(最快)
- X轴:500mm/sec
θ轴:200deg/sec
Z轴:250mm/sec
机械手臂标准规格
- 机械手臂型号
- PHT-R-3-2200
- 控制电缆
- 3m(标准)、5m、10m
- 晶圆吸附方式
- 真空吸附、边缘夹持、边缘保持
- 机械结构格式
- 水平多关节型 圆柱坐标系
- 控制轴
- 3轴
- 驱动源
- 伸缩、旋转、上下3轴 AC 伺服驱动
- 电机类型
- 交流伺服电机 绝对编码器规格
- 搬运手臂
- 采用CFRP+PEEK晶圆插入式设计。
- 映射
- 光电式透射传感器
- 重量
- 本体重量:约47Kg
控制器:约8Kg
- 被搬送物
- ~300mm晶圆
我们还可以灵活定制其他特殊工件、形状和材料。
- 控制规格(1)
- 并行接口 32点输入 32点输出
- 控制规格(2)
- 串行接口 RS-232C × 1线
- 重复性精度
- ±0.1mm以内
- 洁净度
- ISO标准 Class 2级(0.1 μm以上,10个/m³以下)
- 厂务
- 额定电压:单相AC200-230V±10%
额定电流:5A
真空:-80kPa以下10NL/min以上
- 控制器规格
- 控制器型号
- MFD
- 控制通讯方式
- RS232C 1线 数字IO输入:32点,DC24V 8mA
输出:32点,DC24V±3V 0.1A以下
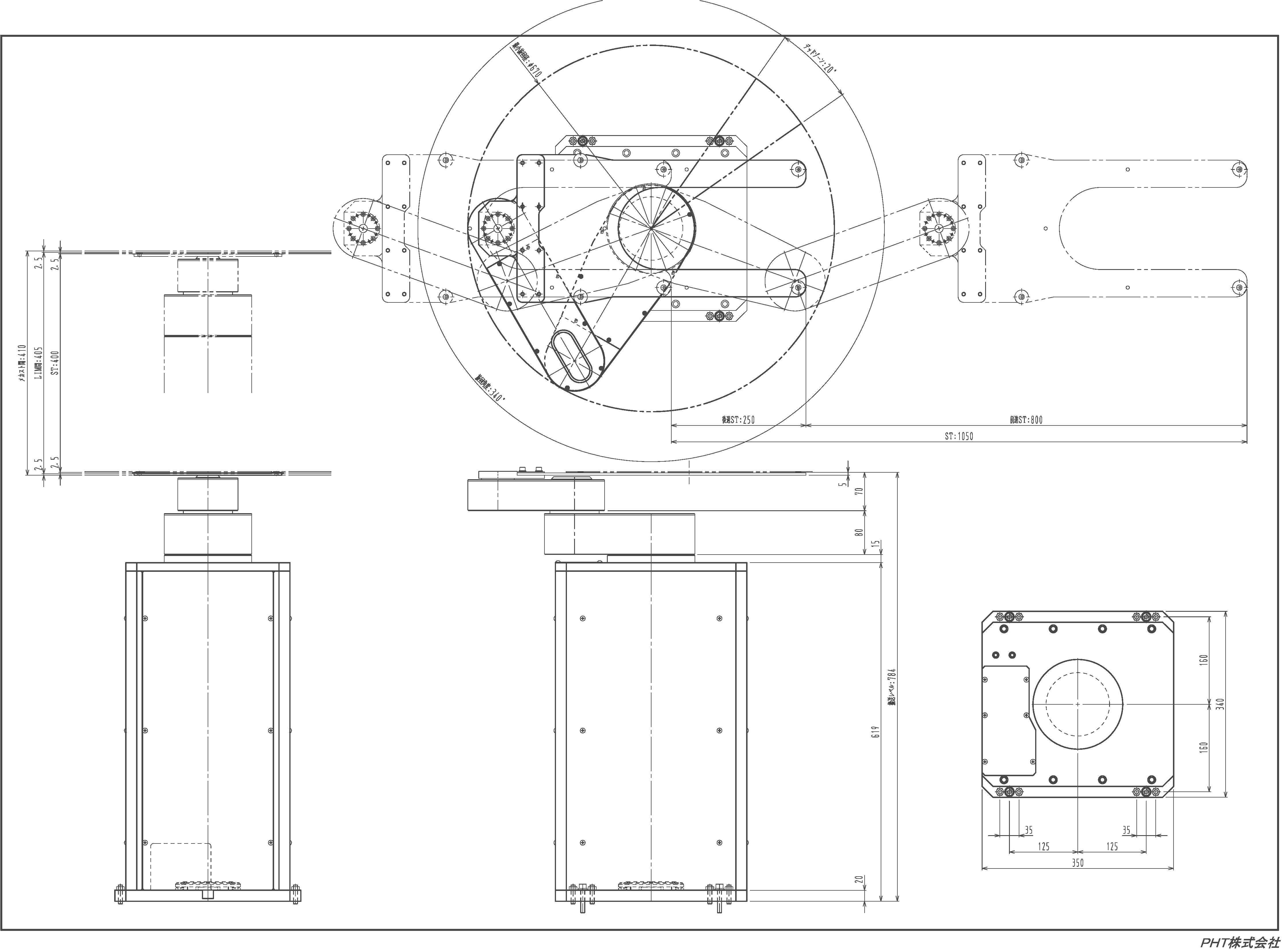
外观图(标准规格)